บทความโดย ดร. วิรินทร์ เมฆประดิษฐสิน
ภาพที่ 1 การสื่อสารเชิงควอนตัม (ภาพจาก : https://phys.org/news/2020-03-fiber-qkd-transmission-distance-km.html)
เมื่อกล่าวถึง การกระจายกุญแจเข้ารหัสเชิงควอนตัม (Quantum Key Distribution: QKD) หลายคนอาจมองว่าเป็นเทคโนโลยีหนึ่งเดียวที่มีหลักการตายตัว แต่ในความเป็นจริง QKD ได้พัฒนาสถาปัตยกรรมและแนวคิดออกเป็นสองสายหลักที่มีพื้นฐานทางฟิสิกส์และการประมวลผลสัญญาณแตกต่างกันอย่างชัดเจน นั่นคือ Discrete-Variable QKD (DV-QKD) และ Continuous-Variable QKD (CV-QKD) ความแตกต่างระหว่างทั้งสองแนวทางนี้ไม่ได้เป็นเพียงรายละเอียดเชิงเทคนิค หากแต่ส่งผลโดยตรงต่อรูปแบบการออกแบบระบบ อุปกรณ์ที่ใช้ ระยะทางในการสื่อสาร อัตราการสร้างกุญแจ และความเหมาะสมในการนำไปใช้งานจริงในบริบทที่แตกต่างกัน
DV-QKD และ CV-QKD สะท้อนให้เห็นว่าความมั่นคงสารสนเทศในยุคควอนตัมไม่ได้มี “คำตอบเดียว” แต่เป็นผลลัพธ์ของการเลือกใช้แนวคิดทางฟิสิกส์ควอนตัมคนละชุด ตั้งแต่การเข้ารหัสข้อมูลบนสถานะควอนตัมแบบไม่ต่อเนื่อง ไปจนถึงการใช้ตัวแปรต่อเนื่องของสนามแม่เหล็กไฟฟ้าในการสร้างและแลกเปลี่ยนกุญแจ บทความนี้จึงมีเป้าหมายเพื่อพาผู้อ่านทำความเข้าใจภาพรวมของ DV-QKD และ CV-QKD ในเชิงแนวคิด สถาปัตยกรรม และนัยเชิงวิศวกรรม เพื่อให้เห็นว่าทั้งสองแนวทางตอบโจทย์ความมั่นคงสารสนเทศในยุคหลังคลาสสิกแตกต่างกันอย่างไร และเหตุใดการเลือกใช้ QKD ประเภทใดประเภทหนึ่งจึงไม่ใช่เพียงเรื่องของทฤษฎี แต่เป็นการตัดสินใจเชิงระบบที่ต้องพิจารณาทั้งฟิสิกส์ เทคโนโลยี และการใช้งานจริงร่วมกัน
รู้จักกับ DV-QKD และ CV-QKD
เจาะลึกความแตกต่างระหว่าง DV-QKD และ CV-QKD ซึ่งเป็นสองแนวทางหลักในการส่งรหัสลับควอนตัมผ่านดาวเทียม (Satellite Cross-links)
1. Discrete Variable QKD (DV-QKD)
เป็นวิธีที่ใช้กันแพร่หลายที่สุดและถูกพิสูจน์แล้วในอวกาศ (เช่น ดาวเทียม Micius ของจีน)
- หลักการ: เข้ารหัสข้อมูลลงบน “อนุภาคเดี่ยว” (Single Photons) โดยใช้คุณสมบัติทางกายภาพที่นับเป็นชิ้นๆ ได้ เช่น Polarization (แนวการหมุน) หรือ Time-bin (ช่วงเวลาที่โฟตอนมาถึง)
- อุปกรณ์ตรวจรับ: ต้องใช้ Single-Photon Detectors (SPDs) ซึ่งมีความไวสูงมากจนตรวจจับโฟตอนเพียงเม็ดเดียวได้
- ข้อดี: * ทนทานต่อสัญญาณรบกวน (Loss) ได้ดีมาก ส่งได้ระยะทางไกล (หลายพันกิโลเมตรในอวกาศ)
- มีอัลกอริทึมความปลอดภัยที่ผ่านการพิสูจน์ทางคณิตศาสตร์อย่างแน่นหนา
- ข้อเสีย: * สร้างแหล่งกำเนิดโฟตอนเดี่ยวที่สมบูรณ์แบบได้ยาก
- อัตราการสร้างกุญแจ (Key Rate) ค่อนข้างต่ำ
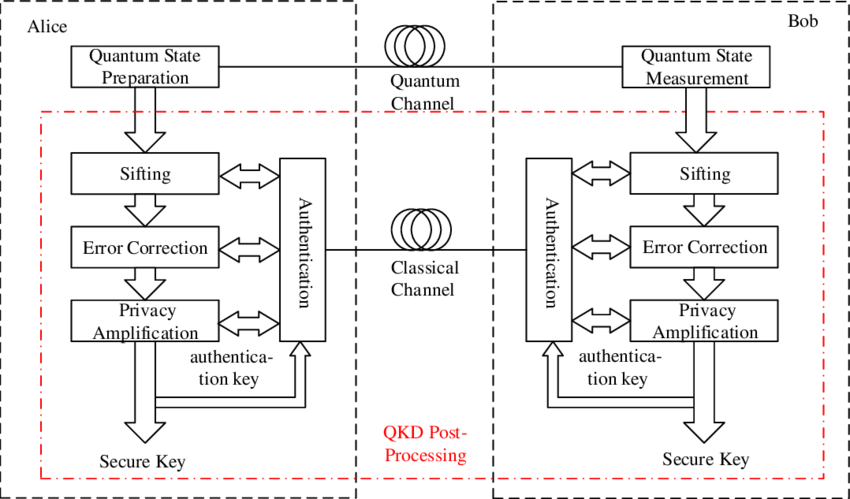
ภาพที่ 2 แสดงโครงสร้างทั่วไปของ QKD (ภาพจาก Researchgate)
หลักการทำงานของ Discrete Variable QKD (DV-QKD) คือการเข้ารหัสข้อมูลลับลงบน “คุณสมบัติเฉพาะตัว” ของอนุภาคแสง (Photons) ทีละอนุภาค โดยอาศัยสถานะทางควอนตัมที่เป็นค่าไม่ต่อเนื่อง (Discrete) เช่น ทิศทางการสั่นของคลื่นแสง (Polarization) หรือ ช่วงเวลาที่โฟตอนเดินทางมาถึง (Time-bin)
เพื่อให้เห็นภาพชัดเจน ผมขออธิบายผ่านโปรโตคอลมาตรฐานที่นิยมที่สุดคือ BB84 โดยแบ่งขั้นตอนการทำงานออกเป็นส่วนๆ ดังนี้
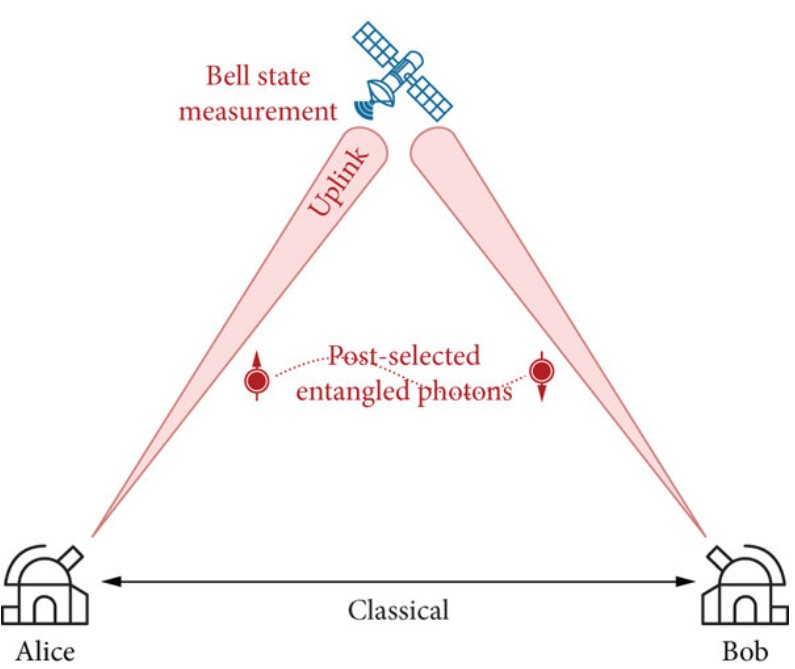
ภาพที่ 3 QKD ผ่านดาวเทียม (ภาพจาก ResearchGate)
1. การเตรียมและส่งสัญญาณ (Quantum State Preparation)
สมมติให้ผู้ส่งคือ Alice และผู้รับคือ Bob
- Alice จะสร้างโฟตอนเดี่ยว (Single Photon) ขึ้นมาทีละตัว
- เธอจะเลือกใช้ “ฐานการวัด” (Basis) 2 แบบสุ่มเพื่อเข้ารหัสโฟตอน:
- Rectilinear Basis (+): แทนค่า 0 ด้วยแนวตั้ง (∣) และแทนค่า 1 ด้วยแนวนอน (−)
- Diagonal Basis (x): แทนค่า 0 ด้วยแนวทแยง 45° (/) และแทนค่า 1 ด้วยแนวทแยง 135° (\)
- Alice ส่งโฟตอนที่ถูกเข้ารหัสเหล่านี้ผ่านช่องสัญญาณควอนตัม (Quantum Channel) ซึ่งในที่นี้คือ Satellite Cross-link โดยมีกระจก MEMS คอยควบคุมทิศทางลำแสงให้แม่นยำ
2. การวัดผลที่ปลายทาง (Quantum Measurement)
- Bob ได้รับโฟตอนจาก Alice แต่เขา “ไม่รู้” ว่า Alice ใช้ Basis ไหนในการส่ง
- Bob ต้อง “สุ่มเดา” Basis เพื่อใช้วัดค่าโฟตอนแต่ละตัวที่ได้รับมา
- ถ้า Bob เดาถูก: เขาจะได้ค่า Bit ที่ตรงกับ Alice (0 หรือ 1)
- ถ้า Bob เดาผิด: ผลการวัดจะกลายเป็นความน่าจะเป็น 50/50 ซึ่งค่าที่ได้อาจจะไม่ตรงกับที่ Alice ส่งมา
3. การคัดกรองกุญแจ (Sifting Phase)
ขั้นตอนนี้ไม่ต้องใช้ช่องสัญญาณควอนตัม แต่ใช้ช่องสัญญาณสื่อสารปกติ (Public Channel)
- Alice และ Bob จะมาคุยกันว่า “โฟตอนตัวที่ 1, 2, 3… พวกเขาใช้ Basis ไหน?” (คุยแค่ชื่อ Basis แต่ ไม่บอก ว่าผลลัพธ์เป็น 0 หรือ 1)
- พวกเขาจะ ตัดผลลัพธ์ที่ใช้ Basis ไม่ตรงกันทิ้งไป
- ข้อมูลที่เหลือจากการใช้ Basis ตรงกันจะถูกเรียกว่า Sifted Key ซึ่งตามทฤษฎีแล้ว ทั้งสองคนควรจะมีเลข 0 และ 1 ที่ตรงกันทุกตำแหน่ง
4. การตรวจสอบผู้ดักฟัง (Eavesdropping Detection)
นี่คือจุดที่กฎฟิสิกส์เข้ามาทำงาน หากมีผู้ดักฟัง (Eve) พยายามดักจับโฟตอน
- ตามกฎ No-Cloning Theorem Eve ไม่สามารถ Copy โฟตอนได้ เธอจึงต้องวัดค่าแล้วส่งต่อ (Intercept and Resend)
- การวัดค่าของ Eve จะทำให้สถานะควอนตัมเปลี่ยนไป (Disturbance)
- Alice และ Bob จะสุ่มเอา Sifted Key บางส่วนมาเทียบกัน (เรียกว่าการหาค่า QBER – Quantum Bit Error Rate)
- หากพบ Error เกินเกณฑ์ (เช่น > 11%): แสดงว่ามีผู้ดักฟัง พวกเขาจะทิ้งกุญแจชุดนั้นทันทีและเริ่มใหม่
5. การปรับแต่งกุญแจให้สมบูรณ์ (Post-processing)
หาก Error อยู่ในเกณฑ์ที่ยอมรับได้ พวกเขาจะทำขั้นตอนสุดท้าย
- Error Correction: ใช้ซอฟต์แวร์แก้ไขบิตที่ผิดพลาดให้ตรงกัน 100%
- Privacy Amplification: เป็นการลดทอนข้อมูลที่ Eve “อาจจะ” รู้ไปได้ โดยการบีบอัดกุญแจให้สั้นลงแต่มีความปลอดภัยเพิ่มขึ้นทวีคูณ จนได้เป็น Final Secret Key
สรุปหัวใจสำคัญของ DV-QKD บนดาวเทียม
ในการทำ DV-QKD ผ่านดาวเทียม ความท้าทายที่ MEMS และระบบควบคุมต้องจัดการคือ
- Polarization Compensation: แสงที่วิ่งผ่านบรรยากาศหรืออวกาศขณะดาวเทียมเคลื่อนที่อาจหมุนไปจากเดิม ระบบต้องปรับแก้ให้ Basis ของ Alice และ Bob สอดคล้องกันตลอดเวลา
- Background Noise Rejection: เนื่องจากเป็นการตรวจวัด “โฟตอนเดี่ยว” แสงจากดวงดาวเพียงนิดเดียวอาจทำให้ระบบเข้าใจผิดว่าเป็นสัญญาณได้ เครื่องรับจึงต้องมีฟิลเตอร์ที่แคบมากและซิงโครไนซ์เวลาได้แม่นยำในระดับนาโนวินาที
อุปกรณ์ตรวจวัด “Single-Photon Detector” ที่ใช้รองรับ DV-QKD
การตรวจจับ “โฟตอนเดี่ยว” (Single-Photon Detection) ในระบบ DV-QKD เปรียบเสมือนการพยายามฟังเสียงเข็มตกในขณะที่มีพายุฝน เพราะสัญญาณที่ส่งมานั้นอ่อนแรงมาก เทคโนโลยีที่ทำให้เราสามารถ “เห็น” แสงเพียงเม็ดเดียวได้ มีหลักการทำงานที่น่าสนใจดังนี้
1. Single-Photon Avalanche Diode (SPAD)
นี่คืออุปกรณ์ที่นิยมใช้มากที่สุดในระบบดาวเทียมขนาดเล็ก เพราะมีขนาดกะทัดรัดและไม่ต้องใช้ระบบทำความเย็นที่ซับซ้อนเกินไป
- หลักการทำงาน (Geiger Mode): * มันคือไดโอดชนิดพิเศษที่ถูกจ่ายไฟเลี้ยงสูงกว่าจุดพังทลาย (Breakdown Voltage) เล็กน้อย
- เมื่อมี โฟตอนเพียงตัวเดียว วิ่งเข้ามาชน มันจะกระตุ้นให้เกิดการปลดปล่อยอิเล็กตรอน และเกิดปฏิกิริยาลูกโซ่ (Avalanche) ทำให้เกิดกระแสไฟฟ้ามหาศาลพอที่เราจะวัดค่าได้
- Quenching: หลังจากเกิดกระแสไหลแล้ว ระบบต้องรีบ “หยุด” (Quench) กระแส่นั้นอย่างรวดเร็ว เพื่อเตรียมตัวรับโฟตอนตัวถัดไป กระบวนการนี้กินเวลาสั้นมากในระดับนาโนวินาที
2. Superconducting Nanowire Single-Photon Detector (SNSPD)
นี่คือเทคโนโลยีระดับสูงสุด (State-of-the-art) ที่ใช้ในสถานีภาคพื้นดินหรือดาวเทียมขนาดใหญ่ที่ต้องการประสิทธิภาพสูงสุด
- หลักการทำงาน: * ใช้เส้นลวดขนาดนาโนที่ทำจากวัสดุ ตัวนำยิ่งยวด (Superconductor) ซึ่งถูกทำให้เย็นจัดจนเกือบถึงศูนย์สมบูรณ์ (ประมาณ -270 องศาเซลเซียส) จนไม่มีความต้านทานไฟฟ้าเลย
- เมื่อโฟตอน 1 เม็ดตกลงบนเส้นลวด พลังงานของมันจะทำลายสภาวะตัวนำยิ่งยวด ณ จุดนั้น ทำให้เกิดความต้านทานไฟฟ้าขึ้นมาชั่วขณะ
- จุดเด่น: มีความแม่นยำสูงมาก (Detection Efficiency เกือบ 100%) และมี Noise (Dark Count) ต่ำกว่า SPAD มาก
3. ความท้าทายในการตรวจจับโฟตอนบนดาวเทียม
เพื่อให้ระบบ DV-QKD ทำงานได้จริงบน Cross-link ตัวรับสัญญาณต้องเผชิญกับอุปสรรคเหล่านี้
- Dark Counts (สัญญาณหลอก): คือการที่ตัวตรวจจับรายงานว่าเจอโฟตอนทั้งที่ไม่มีแสงจริง (อาจเกิดจากความร้อนหรือรังสีในอวกาศ)
- วิธีแก้: ต้องใช้ระบบทำความเย็นแบบ Thermoelectric หรือการใช้อัลกอริทึมตรวจสอบเวลาที่สัญญาณควรจะมาถึงจริง ๆ (Time-gating)
- Dead Time: คือช่วงเวลาที่ตัวตรวจจับ “ตาบอด” ชั่วคราวหลังจากรับโฟตอนไปแล้วเพื่อรีเซ็ตตัวเอง
- วิธีแก้: ต้องออกแบบระบบให้มี Dead time สั้นที่สุด เพื่อรองรับอัตราการส่งรหัส (Key Rate) ที่สูงขึ้น
- Radiation Hardening: ในอวกาศมีรังสีสูงซึ่งสามารถทำลายเซนเซอร์เหล่านี้ได้ วัสดุที่ใช้จึงต้องถูกออกแบบมาให้ทนทานเป็นพิเศษ
4. สรุปความเชื่อมโยงทั้งระบบ
เมื่อเรานำ Detector เหล่านี้มารวมกับระบบที่คุยกันก่อนหน้า
- MEMS จะทำหน้าที่ประคองลำแสงเลเซอร์ให้ตกลงบนพื้นที่รับสัญญาณเล็ก ๆ ของ Detector ให้แม่นที่สุด
- Detector จะทำหน้าที่เปลี่ยนโฟตอนเดี่ยวที่ Alice ส่งมาให้กลายเป็นบิต 0 หรือ 1
- Control Algorithm จะคอยตรวจสอบว่าอัตรา Error (QBER) สูงไปหรือไม่ เพื่อตัดสินใจว่ากุญแจรหัสนี้ปลอดภัยจากการดักฟัง
เทคโนโลยีเหล่านี้รวมกันทำให้การสื่อสารในอวกาศก้าวข้ามขีดจำกัดเดิม ๆ ไปสู่ยุค Quantum Internet อย่างเต็มตัว
ความท้าทายที่ใหญ่ที่สุดของการใช้ Single-Photon Detector บนดาวเทียมคือการแยก “โฟตอนรหัสลับ” ออกจาก “โฟตอนขยะ” ที่มาจากดวงอาทิตย์ ดาวฤกษ์ หรือแม้แต่แสงสะท้อนจากโลก
หากปราศจากระบบจัดการที่ดี สัญญาณรบกวนพื้นหลัง (Background Noise) จะเข้าไปกระตุ้น Detector จนเกิดค่า Error มหาศาล ทำให้ไม่สามารถสร้างกุญแจรหัสได้เลย นี่คือ 3 กลไกหลักที่วิศวกรใช้จัดการกับปัญหานี้
1. Spatial Filtering (การกรองเชิงพื้นที่)
เนื่องจากเราใช้ระบบ Optomechanical (MEMS) ที่มีความแม่นยำสูง เราจึงสามารถบีบวงการรับแสงให้แคบที่สุดเท่าที่จะเป็นไปได้
- Pinhole Aperture: การติดตั้งแผ่นบังแสงที่มีรูขนาดเล็กระดับไมโครเมตรไว้หน้า Detector เพื่อให้เฉพาะแสงที่ขนานมากับลำแสงเลเซอร์เป้าหมายเท่านั้นที่ผ่านเข้าไปได้
- Field of View (FOV) Reduction: การจำกัดมุมมองของหน้ากล้องรับสัญญาณให้แคบลง เพื่อตัดแสงจากดวงดาวรอบข้างออกไป
2. Spectral Filtering (การกรองความถี่แสง)
เลเซอร์ที่ Alice ส่งมามีความยาวคลื่นที่เฉพาะเจาะจงมาก (เช่น 1550.00 nm) แต่แสงอาทิตย์มีทุกความยาวคลื่น
- Ultra-Narrowband Filters: ใช้ฟิลเตอร์พิเศษที่ยอมให้แสงผ่านได้เฉพาะช่วงความถี่ที่แคบมาก (ระดับล้านส่วนของเมตร หรือ Picometers)
- Volume Bragg Gratings (VBG): เทคโนโลยีการกรองแสงขั้นสูงที่ทนต่อความร้อนในอวกาศได้ดีและมีความละเอียดสูงกว่าฟิลเตอร์ปกติ ทำให้ตัด Noise ออกไปได้มากกว่า 99%
3. Temporal Filtering (การกรองเชิงเวลา)
นี่คือเทคนิคที่ฉลาดที่สุด เรียกว่า “Time-Gating”
- Synchronization: Alice และ Bob จะมีนาฬิกาอะตอม (Atomic Clock) ที่ซิงโครไนซ์กันอย่างสมบูรณ์
- Gate Opening: Bob จะเปิดสวิตช์การทำงานของ Detector เฉพาะในช่วงเวลาที่คาดว่าโฟตอนจาก Alice จะมาถึงเท่านั้น (เช่น เปิดแค่ช่วง 1 นาโนวินาที ในทุกๆ 1 ไมโครวินาที)
- Effect: แสง Noise ที่เดินทางมาถึงในช่วงเวลาที่สวิตช์ปิดอยู่จะไม่ถูกนับ ทำให้ SNR (Signal-to-Noise Ratio) เพิ่มขึ้นอย่างมหาศาล
สรุปภาพรวมของระบบในอวกาศ
เมื่อนำเทคโนโลยีทั้งหมดที่เราคุยกันมาประกอบกัน เราจะได้ระบบดังนี้
- MEMS: ประคองลำแสงให้ตรงเป๊ะ (Point & Track)
- Optical Filters: คัดกรองเฉพาะสีของเลเซอร์ (Spectral Filter)
- Single-Photon Detector: รอรับโฟตอนเดี่ยวในโหมด Geiger
- Time-Gating: เปิดรับเฉพาะเวลาที่นัดกันไว้ (Temporal Filter)
- DV-QKD Algorithm: นำบิตที่ได้มาสร้างเป็นรหัสผ่านสุดยอดปลอดภัย
ก้าวต่อไปของเทคโนโลยีนี้
ในอนาคตอันใกล้ เรากำลังมองไปที่ “Entanglement Distribution” ซึ่งไม่ใช่แค่การส่งรหัสผ่าน แต่เป็นการส่ง “สภาวะพัวพัน” ระหว่างดาวเทียมหลายดวง เพื่อสร้าง Quantum Internet ที่สามารถเชื่อมต่อคอมพิวเตอร์ควอนตัมข้ามโลกได้
ความมั่นคงทางการเงินการธนาคาร (Global Finance) และ ความมั่นคงทางทหาร (National Security) จากการใช้ DV-QKD
1. ความมั่นคงทางทหาร (National Security): “The Strategic Shield”
ภาคส่วนนี้มีแนวโน้มที่จะ ลงทุนมหาศาลและเริ่มใช้ก่อน ในระดับรัฐต่อรัฐ
- แรงจูงใจ (Harvest Now, Decrypt Later): ข้อมูลความลับสุดยอด (Top Secret) มีอายุความสำคัญนานหลายสิบปี ปัจจุบันมีภัยคุกคามที่แฮกเกอร์ดูดข้อมูลที่เข้ารหัสไว้ในวันนี้ เพื่อรอไปถอดรหัสในอีก 10 ปีข้างหน้าด้วยคอมพิวเตอร์ควอนตัม QKD จึงเป็นทางเดียวที่จะป้องกันปัญหานี้ได้ทันที
- ลักษณะการใช้งาน
- Secure Chain of Command: การส่งคำสั่งยุทธวิธีจากศูนย์บัญชาการไปยังหน่วยเคลื่อนที่หรือเรือดำน้ำผ่านดาวเทียมโดยไม่โดนดักฟัง
- Intelligence Sharing: การแชร์ข้อมูลข่าวกรองระหว่างพันธมิตร (เช่น กลุ่ม Five Eyes) ผ่าน Inter-satellite Cross-links เพื่อหลีกเลี่ยงการใช้สายเคเบิลใต้ทะเลที่อาจถูกตัดหรือดักจับสัญญาณได้
- อุปสรรค: ต้นทุนมหาศาลและความซับซ้อนของอุปกรณ์ที่ต้องทนทานต่อสภาพสงครามและรังสี
2. การเงินการธนาคาร (Global Finance): “The Trusted Backbone”
ภาคส่วนนี้จะผลักดันให้เกิด การใช้งานในเชิงพาณิชย์และขยายเครือข่ายให้ครอบคลุม ทั่วโลก
- แรงจูงใจ (Infrastructure Integrity): ระบบธนาคารปัจจุบันตั้งอยู่บน “ความเชื่อถือ” (Trust) หากระบบเข้ารหัส Swift หรือระบบโอนเงินระหว่างประเทศถูกเจาะพังทลายเพียงครั้งเดียว ระบบเศรษฐกิจโลกจะล่มสลายทันที
- ลักษณะการใช้งาน
- Quantum-Secured Data Centers: การทำ Data Mirroring หรือการสำรองข้อมูลข้ามทวีป โดยใช้กุญแจควอนตัมในการล็อคท่อส่งข้อมูล (Data Pipe)
- High-Frequency Trading (HFT): การใช้ลิงก์เลเซอร์บนดาวเทียมที่มีความหน่วง (Latency) ต่ำกว่าไฟเบอร์ออปติก พร้อมเสริมความปลอดภัยด้วย QKD เพื่อป้องกันการแทรกแซงคำสั่งซื้อขาย
- อุปสรรค: กฎระเบียบข้อบังคับ (Compliance) และความต้องการอัตราการสร้างกุญแจ (Key Rate) ที่สูงมากเพื่อให้ทันกับปริมาณธุรกรรมมหาศาล
3. ตารางสรุปเปรียบเทียบเชิงยุทธศาสตร์
| ปัจจัย | ความมั่นคงทางทหาร | การเงินการธนาคาร |
| ความเร่งด่วน | สูงมาก (เพื่อป้องกันอดีตและอนาคต) | สูง (เพื่อรักษาความเชื่อมั่นระบบ) |
| งบประมาณ | งบประมาณรัฐ (ไม่เน้นกำไร) | งบประมาณเอกชน (เน้นความคุ้มค่า) |
| ขอบเขตการใช้งาน | เฉพาะกลุ่ม/หน่วยงานลับ | เครือข่ายสาขาและ Data Center ทั่วโลก |
| ตัวขับเคลื่อนหลัก | การแข่งขันทางภูมิรัฐศาสตร์ | กฎหมายดิจิทัลและภัยคุกคามไซเบอร์ |
2. Continuous Variable QKD (CV-QKD)
เป็นเทคโนโลยีที่กำลังถูกผลักดันเพราะสามารถใช้ร่วมกับอุปกรณ์สื่อสารใยแก้วนำแสงทั่วไปได้ง่ายกว่า
- หลักการ: ไม่ได้นับโฟตอนเป็นเม็ดๆ แต่ใช้วิธีวัด “คุณสมบัติคลื่น” (Quadrature components) ของสนามแม่เหล็กไฟฟ้า เช่น Amplitude (แอมพลิจูด) และ Phase (เฟส) โดยใช้เลเซอร์ที่มีความเข้มสูงกว่า (Coherent States)
- อุปกรณ์ตรวจรับ: ใช้เทคนิค Coherent Detection (เหมือนกับระบบอินเทอร์เน็ตความเร็วสูง 100G/400G บนโลก) ซึ่งไม่ต้องใช้เครื่องตรวจจับโฟตอนเดี่ยวราคาแพง
- ข้อดี: * ให้ Key Rate ที่สูงกว่ามาก ในระยะทางใกล้ถึงปานกลาง
- อุปกรณ์หาได้ง่ายกว่าและสามารถทำ Integration ลงบนชิป (Photonic Integrated Circuits) ได้ดี
- ข้อเสีย: * แพ้ Loss: สัญญาณจะเปราะบางมากเมื่อเจอระยะทางไกลๆ หรือความล่าช้า
- ในอวกาศ การรักษาเสถียรภาพของ Phase ระหว่างดาวเทียมที่วิ่งด้วยความเร็วสูงเป็นโจทย์ที่ยากมหาศาล
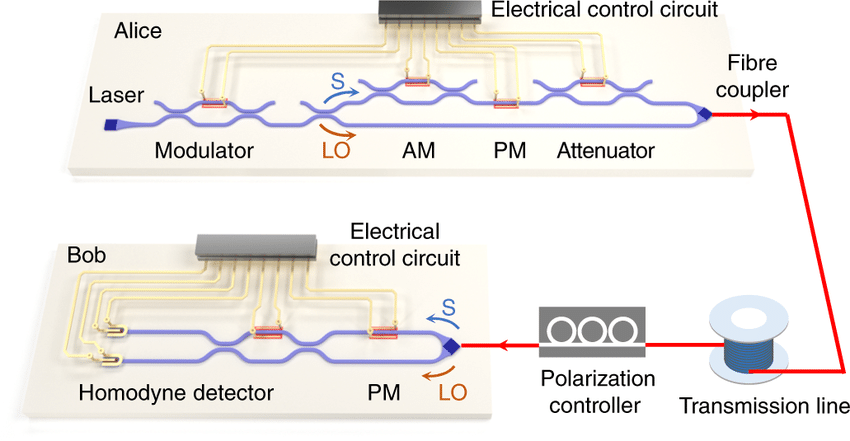
ภาพที่ 4 แสดงโครงสร้างสำหรับการทดลองของ CV-QKD (ภาพจาก Download Scientific Diagram)
หลักการทำงานของ Continuous Variable QKD (CV-QKD) มีความแตกต่างเชิงลึกจาก DV-QKD อย่างมาก แทนที่จะนับอนุภาคแสงเป็นเม็ดๆ (Discrete) CV-QKD จะใช้การวัด “คุณสมบัติเชิงคลื่น” ของแสงที่มีความต่อเนื่อง เช่น แอมพลิจูด (Amplitude) และ เฟส (Phase) ซึ่งเป็นเทคโนโลยีเดียวกับที่ใช้ในระบบอินเทอร์เน็ตความเร็วสูง (Coherent Communications) ในปัจจุบัน
1. การเตรียมและส่งสัญญาณ (Preparation Phase)
ในระบบ CV-QKD ผู้ส่ง (Alice) จะไม่ได้ส่งโฟตอนเดี่ยว แต่ส่ง “Coherent States” (สถานะเลเซอร์ที่ปรับกำลังให้อ่อนลงมากๆ)
- Quadratures เข้ารหัส: Alice จะสุ่มเลือกค่า x (Amplitude) และ p (Phase) จากการแจกแจงแบบเกาส์เซียน (Gaussian Distribution)
- Modulation: เธอใช้เครื่องมือที่เรียกว่า Optical Phase & Amplitude Modulator เพื่อฝังข้อมูลลงในคลื่นแสง
- Quantum Uncertainty: ตามหลักความไม่แน่นอนของไฮเซนเบิร์ก (Heisenberg’s Uncertainty Principle) เราไม่สามารถรู้ทั้งค่า x และ p ให้แม่นยำที่สุดพร้อมกันได้ ความไม่แน่นอนนี้เองที่เป็น “เกราะป้องกัน” ของควอนตัม
2. การตรวจรับสัญญาณ (Coherent Detection)
เมื่อสัญญาณเดินทางผ่าน Cross-link มาถึงผู้รับ (Bob) เขาจะใช้วิธีการวัดที่เรียกว่า Homodyne หรือ Heterodyne Detection
- Local Oscillator (LO): Bob จะใช้เลเซอร์ของตัวเอง (หรือที่ส่งมาพร้อมสัญญาณ) มาผสมกับสัญญาณที่ได้รับ เพื่อขยายสัญญาณควอนตัมที่อ่อนมากให้แรงพอที่จะวัดได้ด้วย Photo-detectors มาตรฐาน
- Measurement: Bob จะสุ่มเลือกวัดค่า x หรือ p (ถ้าเป็น Homodyne) หรือวัดทั้งคู่พร้อมกัน (ถ้าเป็น Heterodyne)
- ผลลัพธ์: ค่าที่ Bob วัดได้จะเป็นค่าต่อเนื่อง (เช่น 1.245, -0.892) ไม่ใช่แค่ 0 หรือ 1 เหมือน DV-QKD
3. ขั้นตอนหลังการประมวลผล (Post-processing)
เนื่องจากค่าที่ได้เป็นตัวเลขต่อเนื่องและมีสัญญาณรบกวน (Noise) ผสมอยู่ ขั้นตอนนี้จึงซับซ้อนกว่าปกติ:
- Sifting: Alice และ Bob คุยกันผ่านช่องทางปกติเพื่อยืนยันว่าใช้ Basis ตรงกันไหม
- Parameter Estimation: ตรวจสอบว่ามี Noise ในระบบมากเกินไปหรือไม่ (ถ้า Noise สูงเกินไป แสดงว่าอาจมี Eve ดักฟัง)
- Information Reconciliation (Error Correction): นี่คือหัวใจของ CV-QKD ต้องใช้อัลกอริทึมที่ซับซ้อนมาก เช่น Multi-edge Type LDPC codes เพื่อแปลงค่าตัวเลขต่อเนื่องที่คลาดเคลื่อนกันเล็กน้อย ให้กลายเป็นบิต 0 และ 1 ที่ตรงกันเป๊ะ
- Privacy Amplification: บีบอัดกุญแจรหัสเพื่อกำจัดข้อมูลที่ผู้ดักฟังอาจจะล่วงรู้ไปได้
4. ข้อดีและข้อเสียเชิงเทคนิคบนดาวเทียม
| หัวข้อ | รายละเอียดในมุมมอง CV-QKD |
| ความเข้ากันได้ | สูงมาก สามารถใช้ Photo-detectors และ Modulator ทั่วไปได้ ไม่ต้องใช้ตัวรับโฟตอนเดี่ยวราคาแพง |
| อัตราการส่งรหัส (Key Rate) | สูงกว่า DV-QKD ในระยะใกล้-ปานกลาง เพราะส่งข้อมูลได้หนาแน่นกว่าต่อหนึ่ง Pulse แสง |
| ความท้าทายในอวกาศ | Phase Stability: เนื่องจากดาวเทียมเคลื่อนที่เร็ว การรักษาเฟสของแสงให้คงที่เพื่อวัดค่านั้นทำได้ยากมาก (ต้องใช้ระบบ DSP ขั้นสูง) |
| ความอ่อนไหวต่อ Loss | สูง: หากสัญญาณจางลง (Loss มากกว่า 10-20 dB) ประสิทธิภาพจะตกลงเร็วกว่า DV-QKD |
สรุปภาพรวม: ทำไม CV-QKD ถึงน่าสนใจ?
ในเชิงพาณิชย์ CV-QKD เปรียบเสมือนการพยายามสร้าง “Quantum Secure Internet” โดยใช้โครงสร้างพื้นฐานเดิมที่มีอยู่ได้มากกว่า มันจึงเหมาะมากสำหรับ Satellite-to-Ground Link หรือการเชื่อมต่อระหว่างสถานีฐานที่ต้องการแบนด์วิธสูง
อย่างไรก็ตาม สำหรับ Inter-satellite Cross-link ระยะไกลมากๆ (เช่น 5,000 กม. ขึ้นไป) DV-QKD ยังคงเป็นผู้ชนะในเรื่องความทนทานต่อระยะทาง
การจัดการเฟสของแสง (Phase Compensation) ขณะดาวเทียมวิ่งด้วยความเร็วสูง
การจัดการเฟสของแสง (Phase Compensation) ในระบบ CV-QKD บนดาวเทียม เป็นความท้าทายระดับ “วิศวกรรมขั้นสูงสุด” เพราะข้อมูลจะถูกฝังอยู่ในสถานะทางควอนตัมของเฟสแสง หากเฟสเพี้ยนไปแม้เพียงนิดเดียว ข้อมูลจะกลายเป็น Noise ทันที
เมื่อดาวเทียมวิ่งด้วยความเร็วสูง (ประมาณ 7.5 km/s สำหรับวงโคจร LEO) ปัญหาหลักที่เกิดขึ้นคือ Doppler Shift และ Phase Jitter
1. ปัญหา: Doppler Shift และ Phase Drift
- Doppler Shift: ความเร็วที่ต่างกันระหว่างดาวเทียมผู้ส่ง (Alice) และผู้รับ (Bob) ทำให้ความถี่ของแสง “ยืด” หรือ “หด” ส่งผลให้เฟสของแสงหมุนไปอย่างรวดเร็ว (Phase Rotation)
- Phase Noise: เกิดจากการสั่นสะเทือนของตัวดาวเทียม (Jitter), การขยายตัวทางความร้อนของอุปกรณ์ Optomechanical และความไม่เสถียรของเลเซอร์เอง
2. กลไกการจัดการเฟส (Phase Compensation Techniques)
เพื่อให้ Bob สามารถวัดค่าเฟสที่ Alice ส่งมาได้อย่างถูกต้อง ระบบต้องใช้เทคนิคผสมผสานดังนี้
ก. การใช้ Pilot Tone (Reference Signal)
Alice จะไม่ได้ส่งแค่สัญญาณควอนตัมที่อ่อนมากๆ ไปเพียงอย่างเดียว แต่จะส่ง “สัญญาณอ้างอิง” (Pilot Tone) ที่มีความเข้มสูงกว่าไปพร้อมกัน
- หน้าที่: สัญญาณ Pilot นี้จะเผชิญกับ Doppler Shift และความเพี้ยนเหมือนกับสัญญาณควอนตัมเป๊ะๆ
- การใช้งาน: เมื่อ Bob ได้รับสัญญาณ เขาจะวัดเฟสของ Pilot Tone ก่อน เพื่อดูว่ามันเพี้ยนไปเท่าไหร่ แล้วจึงนำค่านั้นไป “หักลบ” ออกจากสัญญาณควอนตัม (Phase Recovery)
ข. เทคโนโลยี Local Oscillator (LO) การจัดการ 2 รูปแบบ
- Transmitted LO (TLO): Alice ส่งเลเซอร์ตัวหลัก (LO) ไปพร้อมกับสัญญาณควอนตัม วิธีนี้จัดการเฟสได้ง่ายที่สุดเพราะ Noise จะเคลื่อนที่ไปพร้อมกัน แต่มีข้อเสียคือแฮกเกอร์อาจดักดู LO เพื่อโจมตีระบบได้
- Local LO (LLO): Bob ใช้เลเซอร์ของตัวเองที่ปลายทาง วิธีนี้ปลอดภัยกว่ามาก แต่ยากมหาศาล เพราะต้องทำให้เลเซอร์สองตัวที่อยู่ห่างกันหลายพันกิโลเมตร “เต้นจังหวะเดียวกัน” (Frequency & Phase Locking)
ค. การชดเชยด้วย Digital Signal Processing (DSP)
เนื่องจากเฟสเปลี่ยนเร็วเกินกว่าที่กลไกทางกายภาพจะหมุนตามทัน ระบบจึงต้องใช้ชิปประมวลผลความเร็วสูง (FPGA) มาจัดการ
- Carrier Phase Estimation (CPE): อัลกอริทึมจะคำนวณทิศทางการหมุนของเฟสแบบ Real-time และหมุนค่ากลับในเชิงดิจิทัล
- Frequency Offset Compensation: คำนวณค่าเบี่ยงเบนความถี่จาก Doppler Effect และปรับจูนตัวรับสัญญาณให้ตรงกัน
3. บทบาทของ MEMS และ Optomechanics ในการคุมเฟส
แม้การแก้เฟสส่วนใหญ่จะทำในภาคไฟฟ้า (DSP) แต่ส่วนกลศาสตร์ก็สำคัญมาก
- Vibration Isolation: MEMS ช่วยในการประคองลำแสงให้เข้าสู่ท่อนำแสง (Fiber Coupling) ได้นิ่งที่สุด หากแสงวูบวาบจากการสั่นสะเทือน (Scintillation) จะทำให้การคำนวณเฟสใน DSP ผิดพลาด
- Optical Path Length Control: ในระบบที่ต้องการความแม่นยำสูง อาจมีการใช้ Piezo-electric actuators เพื่อปรับระยะทางเดินแสงภายในเครื่องรับเพื่อชดเชยระยะทางที่เปลี่ยนไปในระดับนาโนเมตร
4. สรุป: วงจรการชดเชยเฟสบนอวกาศ
เพื่อให้เห็นภาพรวม ขั้นตอนจะเป็นดังนี้
- Coarse Tracking: ดาวเทียมหันหน้าหากัน (ใช้ Star Tracker)
- Fine Tracking: MEMS ล็อคลำแสงให้เข้าเป้า (Point & Track)
- Frequency Locking: ปรับจูนความถี่เลเซอร์ชดเชย Doppler Shift
- Phase Recovery: ใช้ Pilot Tone และ DSP คืนค่าเฟสควอนตัมที่ถูกต้อง
ข้อคิดเห็น: การจัดการเฟสใน CV-QKD เป็นจุดที่แยกระหว่าง “ทฤษฎี” กับ “การใช้งานจริง” หากจัดการจุดนี้ไม่ได้ Key Rate จะเป็นศูนย์ทันที
การจัดการกับ Mechanical Jitter หรือแรงสั่นสะเทือนระดับไมโคร (Micro-vibrations) คือปัจจัยชี้ขาดความสำเร็จของ CV-QKD เพราะในขณะที่เลเซอร์มีความยาวคลื่นเพียง 1550 nm การสั่นสะเทือนเพียงเล็กน้อยของโครงสร้างดาวเทียมสามารถทำให้ระยะทางเดินแสง (Optical Path Length) เปลี่ยนไป ซึ่งส่งผลโดยตรงต่อการเลื่อนเฟส (Phase Shift) ของสัญญาณควอนตัม
การออกแบบโครงสร้างดาวเทียมเพื่อแก้ปัญหานี้ แบ่งออกเป็น 3 ระดับ (Layers) ดังนี้
1. การจัดการที่ต้นตอ (Source Mitigation)
แหล่งกำเนิด Jitter หลักบนดาวเทียมมักมาจากส่วนที่มีการเคลื่อนที่ (Moving Parts)
- Reaction Wheels: มอเตอร์ที่ใช้ควบคุมทิศทางดาวเทียม ซึ่งมีการหมุนด้วยความเร็วสูง
- Cryocoolers: ระบบทำความเย็นสำหรับ Detector ที่มีชิ้นส่วนปั๊มสั่นสะเทือน
- Solar Array Drive Mechanisms (SADM): มอเตอร์หมุนแผงโซลาร์เซลล์
แนวทางการออกแบบ
- Dynamic Balancing: การถ่วงน้ำหนัก Reaction Wheels ให้สมดุลที่สุดในระดับไมโคร
- Speed Avoidance: การเขียนซอฟต์แวร์ควบคุมไม่ให้มอเตอร์หมุนในความเร็วที่ไปตรงกับ ค่าความถี่ธรรมชาติ (Resonant Frequency) ของโครงสร้างกล้องเลเซอร์
2. ระบบกันสะเทือน (Vibration Isolation Systems)
เป็นการคั่นกลางระหว่าง “ตัวดาวเทียม” กับ “อุปกรณ์ออปติก” เพื่อไม่ให้แรงสั่นสะเทือนส่งผ่านถึงกัน
- Passive Isolation: * การใช้ลูกยางหรือวัสดุประเภท Viscoelastic ในการยึดอุปกรณ์ (Damping)
- Honeycomb Structures: การออกแบบโครงสร้างพื้นฐานของดาวเทียมเป็นรวงผึ้งเพื่อช่วยดูดซับพลังงานจลน์
- Active Isolation (Active Mounts):
- ใช้ Piezoelectric Actuators หรือ Voice Coil Actuators ที่มีเซนเซอร์ตรวจจับแรงสั่นสะเทือน (Accelerometers) แล้วสร้างแรงต้านในทิศทางตรงข้ามแบบ Real-time (คล้ายระบบ Noise Cancelling ในหูฟังแต่ใช้กับแรงสั่นสะเทือน)
3. การออกแบบระบบ Optical Payload ให้มีความเสถียรสูง
เมื่อแรงสั่นสะเทือนบางส่วนหลุดเข้ามาถึงระบบออปติก เราต้องออกแบบโครงสร้างภายในให้ทนทานที่สุด:
- Ultra-low Expansion Materials: การใช้เคสและฐานยึดกระจกที่ทำจาก Invar หรือ Silicon Carbide (SiC) ซึ่งมีอัตราการขยายตัวต่ำมากเมื่ออุณหภูมิเปลี่ยน และมีความแข็งเกร็ง (Stiffness) สูงมากเพื่อลดการบิดตัว
- Monolithic Optical Design: การพยายามรวมชิ้นส่วนกระจกหลายๆ ชิ้นให้เป็นเนื้อเดียวกัน หรือใช้การเชื่อมแบบกาวพิเศษที่แข็งตัวถาวร เพื่อลดจุดรอยต่อที่อาจขยับได้เมื่อโดนสั่นสะเทือน
- Fast Steering Mirrors (FSM): นี่คือจุดที่ MEMS เข้ามามีบทบาทสำคัญที่สุด FSM จะคอยขยับกระจกด้วยความเร็วสูง (หลัก kHz) เพื่อชดเชยการส่ายของลำแสง (Beam Wander) ที่เกิดจาก Jitter ของตัวดาวเทียม
4. การจัดการเชิงระบบ: Structural-Thermal-Optical (STOP) Analysis
วิศวกรจะใช้การจำลองด้วยคอมพิวเตอร์ที่เรียกว่า STOP Analysis เพื่อดูความสัมพันธ์ทั้งหมด:
- Structural: แรงสั่นสะเทือนจากการทำงานของอุปกรณ์
- Thermal: ความร้อนที่ทำให้อุปกรณ์ขยายตัวจนเฟสเปลี่ยน
- Optical: ผลลัพธ์สุดท้ายที่เกิดขึ้นกับลำแสงเลเซอร์
การออกแบบที่ดีต้องทำให้ Optical Bench (ฐานรองอุปกรณ์ออปติก) แยกตัวเป็นอิสระ (Decoupled) จากโครงสร้างหลักของดาวเทียม (Bus) ให้มากที่สุดเท่าที่จะเป็นไปได้
สรุปความสำคัญต่อ CV-QKD
หากดาวเทียมมีการสั่นสะเทือนที่คุมไม่ได้
- Phase Noise จะสูงเกินกว่าที่อัลกอริทึม DSP จะกู้คืนได้
- Coupling Loss แสงเลเซอร์จะไม่สามารถวิ่งเข้าสู่เส้นใยนำแสงเดี่ยว (Single-mode Fiber) บนตัวรับได้ ทำให้สัญญาณขาดหายไป
กลยุทธ์รวม: “ลดที่ต้นตอ -> กรองที่ฐานยึด -> ชดเชยด้วยกระจก MEMS” คือสูตรสำเร็จของการออกแบบดาวเทียมยุคควอนตัม
การประยุกต์ใช้ในอนาคต: “Hybrid Quantum Networks”
ในอนาคต เครือข่ายดาวเทียมอาจใช้ทั้งสองระบบร่วมกัน
- DV-QKD: ใช้สำหรับ Long-haul Cross-links ระหว่างดาวเทียมที่อยู่ห่างกันคนละฟากฟ้า เพื่อความชัวร์ในความปลอดภัยและระยะทาง
- CV-QKD: ใช้สำหรับ High-density Links ในกลุ่มดาวเทียมที่อยู่ใกล้กัน (Constellation) หรือส่งลงสถานีภาคพื้นดินในสภาวะที่ทัศนวิสัยดี เพื่อเน้นความเร็วในการสร้างรหัส
สรุปความเชื่อมโยงกับ MEMS และ Control Systems
ไม่ว่าจะเป็น DV หรือ CV สิ่งที่ขาดไม่ได้คือ ระบบควบคุมที่กล่าวถึงในตอนแรก
- ถ้าเป็น DV-QKD MEMS ต้องคุม Polarization ให้เป๊ะ
- ถ้าเป็น CV-QKD MEMS ต้องคุมลำแสงให้เข้าสู่ท่อนำแสง (Fiber Coupling) บนดาวเทียมฝั่งรับให้เสถียรที่สุดเพื่อลด Noise