บทความโดย ดร. วิรินทร์ เมฆประดิษฐสิน
ระบบ Laser Communication เป็นการบูรณาการเทคโนโลยีขั้นสูงหลายสาขา ตั้งแต่ฟิสิกส์เชิงแสง กลศาสตร์ความแม่นยำสูง อิเล็กทรอนิกส์ความเร็วสูง ไปจนถึงอัลกอริทึมอัจฉริยะ เทคโนโลยีแต่ละกลุ่มทำหน้าที่ “ชนะข้อจำกัดทางฟิสิกส์” ในคนละมิติ
การสื่อสารด้วยเลเซอร์ในอวกาศไม่สามารถพึ่งพาเลเซอร์ที่มีกำลังสูงหรืออัลกอริทึมที่ชาญฉลาดเพียงอย่างเดียวได้ หากขาดระบบกลศาสตร์เชิงแสง (optomechanical system) ที่แม่นยำ ลำแสงเลเซอร์ที่แคบระดับไมโครเรเดียนจะไม่สามารถชี้ไปยังเป้าหมายได้อย่างเสถียร แม้การคลาดเคลื่อนเพียงเล็กน้อยในระดับกลไก ก็อาจทำให้การเชื่อมต่อสื่อสารล้มเหลวโดยสิ้นเชิง
1. โครงสร้างการติดตั้งเชิงแสงความแม่นยำสูง(Precision Optical Mounts & Structural Stability)
ระบบ laser communication ต้องรักษาการจัดแนวของเลนส์ กระจก และออปติกทั้งหมดให้อยู่ในตำแหน่งที่ถูกต้องอย่างยิ่ง แม้ในสภาพแวดล้อมที่มีการเปลี่ยนแปลงอุณหภูมิอย่างรุนแรงและมีแรงสั่นสะเทือนตลอดเวลา เช่น บนยานอวกาศหรือแพลตฟอร์มทางการทหาร
โครงสร้างการติดตั้งอุปกรณ์การสื่อสารเชิงแสงจึงต้องถูกออกแบบให้:
- มีความแข็งแรงเชิงกลสูง
- มีการขยายตัวจากอุณหภูมิต่ำมาก (low CTE)
- ไม่บิดงอเมื่อรับแรงเร่งหรือแรงสั่น
วัสดุอย่าง Zerodur, Invar หรือวัสดุผสมพิเศษจึงถูกเลือกใช้ แม้จะมีต้นทุนสูง เนื่องจากความผิดพลาดเพียงระดับไมโครเมตรสามารถแปลเป็นการคลาดเคลื่อนของลำแสงหลายร้อยกิโลเมตรในระยะทางไกลระดับอวกาศห้วงลึก (Deep Space)
เชิงยุทธศาสตร์:
โครงสร้างที่เสถียร = เส้นทางการเชื่อมต่อที่คาดการณ์ได้
โครงสร้างที่ไม่เสถียร = จุดล้มเหลวที่ฝ่ายตรงข้ามอาจใช้ประโยชน์
2. เทคโนโลยีแหล่งกำเนิดแสงและโฟโตนิกส์ (Photonics & Laser Source Technologies)
2.1 Space-Qualified Laser Sources
คุณสมบัติของเลเซอร์ที่ใช้ในอวกาศห้วงลึก(deep space) จำต้อง
- ทำงานต่อเนื่องหลายปีโดยไม่มีการซ่อม
- ทน รังสีในอวกาศ ภาวะสุญญากาศ และการหมุนเวียนไปมาของอุณหภูมิ
- มี phase noise และ linewidth ต่ำ
ความยาวคลื่นที่นิยม (~1550 nm) ความยาวคลื่นนี้ไม่ได้ถูกเลือกเพราะกำลังสูงที่สุด
แต่เพราะ
- ปกป้องสายตา (เชิงภาคพื้นดิน)
- เทคโนโลยี fiber + amplifier mature (ระดับความพร้อมและความเสถียรของเครื่องขยายสัญญาณ)
- เข้ากับระบบนิเวศวิทยาทั้งระบบ
เชิงยุทธศาสตร์:
ประเทศที่ควบคุม supply chain ของระบบการสื่อสาร Laser ที่มีคุณภาพสูงในอวกาศ = คุม backbone ของการสื่อสารในอวกาศ
2.2 Optical Amplifiers (EDFA / Space Amplification)
Amplifier ทำหน้าที่ “เพิ่มพลังโฟตอน” โดยไม่เพิ่ม beam divergence ต่างจากการเพิ่มกำลังเลเซอร์โดยตรง
- EDFA เพิ่มความสามารถในการเดินทางเข้าถึงของ Link
- ลดภาระพลังงานต้นทาง
- สำคัญมากกับ การ Uplink สัญญาณในอวกาศห้วงลึก และการรีเลย์ของสัญญาณสำหรับทางการทหาร
หากขาดระบบขยายสัญญาณ (Amplifier) ที่มีประสิทธิภาพ จำเป็นต้องชดเชยด้วยการขยายขนาดรูรับแสงของอุปกรณ์ออปติก (Optics Aperture) ซึ่งจะส่งผลโดยตรงต่อการเพิ่มขึ้นของมวลรวม และนำไปสู่ต้นทุนการส่งมอบภารกิจสู่อวกาศที่สูงขึ้นอย่างมหาศาล
2.3 Telescopes & Beam Expanders
อุปกรณ์เชิงแสง ไม่ได้มีไว้ “มอง” แต่มีไว้ควบคุมรูปทรงของลำแสง
- ขยาย beam ช่วย ลด divergence
- ควบคุมคุณภาพของ wavefront
- สัมพันธ์โดยตรงกับ pointing error budget
ในการสื่อสารด้วยเลเซอร์ในอวกาศ (Free-Space Optical Communication – FSOC) ซึ่งมีความกว้างของลำแสง (Beamwidth) แคบมากในระดับไมโครเรเดียน (Microradians) Pointing Error Budget คือการบริหารจัดการ “ค่าความคลาดเคลื่อนที่ยอมรับได้” ในการพุ่งเป้าลำแสงจากต้นทางไปยังปลายทาง เพื่อให้มั่นใจว่าพลังงานแสงจะตกกระทบที่ตัวรับ (Receiver) ได้อย่างเสถียร
หากเปรียบเทียบให้เห็นภาพ การยิงเลเซอร์จากดาวเทียมวงโคจรต่ำ (LEO) ไปยังสถานีภาคพื้นดิน หรือระหว่างดาวเทียมด้วยกัน การรักษาเสถียรภาพของลำแสงเลเซอร์ข้ามระยะทางมหาศาล เปรียบได้กับการถือเข็มเย็บผ้าแล้วพยายามพุ่งเส้นด้ายให้ลอดผ่านรูเข็มที่อยู่ห่างออกไปนับพันกิโลเมตร โดยที่คู่สถานีทั้งสองฝั่งต่างพุ่งทะยานด้วยความเร็วสูงในวงโคจร ซึ่งเป็นบทพิสูจน์ถึงขีดสุดของเทคโนโลยีการนำทางและควบคุม
3. Fast Steering Mirrors (FSM)
กลไกปรับทิศทางลำแสงความเร็วสูง
Fast Steering Mirror เป็นหนึ่งในองค์ประกอบสำคัญที่สุดของระบบ optomechanical FSM คือกระจกขนาดเล็กที่สามารถปรับมุมสะท้อนของลำแสงได้อย่างรวดเร็ว (ระดับ kHz) เพื่อชดเชยการสั่น การส่าย หรือความคลาดเคลื่อนเล็ก ๆ ที่เกิดขึ้นตลอดเวลา

ภาพที่ 1 กลไกการทำงานของ FSM (ภาพจาก PU-USA.us)
ในระบบจริง FSM ทำหน้าที่
- แก้ไข pointing jitter
- ชดเชยการสั่นสะเทือนจาก reaction wheels หรือโครงสร้างยาน
- รักษาลำแสงให้อยู่ “ตรงกลาง aperture” ของตัวรับ
หากไม่มี FSM ระบบจะต้องพึ่งพาการควบคุมเชิงกลขนาดใหญ่ ซึ่งช้าเกินไปสำหรับลำแสงเลเซอร์
ในมุมมองของทหาร
FSM เปรียบเสมือน “จุดรวมระบบประสาทที่ตอบสนองต่อการเคลื่อนไหว’ ของอุปกรณ์ส่งสัญญาณ หากเราสามารถแทรกแซงให้ FSM ทำงานผิดเพี้ยนไปเพียงเล็กน้อย จะส่งผลให้ลำแสงหลุดออกจากเป้าหมาย (Miss-pointing) และทำให้การสื่อสารล่มสลายลงได้โดยไม่ต้องทำลายตัวเครื่อง
4. Gimbal Systems & Coarse Pointing Mechanisms
ระบบเล็งเป้าระดับหยาบ
ก่อนที่ FSM จะทำงาน ระบบต้องสามารถ “เล็งเป้าให้ถูกก่อน” ซึ่งเป็นหน้าที่ของ gimbal หรือ coarse pointing assembly ระบบนี้เป็นกลไกหมุนแบบหลายแกน (2–3 DOF) ที่ใช้ชี้ optical terminal ไปยังตำแหน่งเป้าหมายโดยประมาณ
หน้าที่หลักของ gimbal
- หมุนตามการเคลื่อนที่ของยานและโลก
- รองรับการเปลี่ยนทิศทางขนาดใหญ่
- ทำงานร่วมกับข้อมูลจาก star tracker และ ephemeris (ชุดข้อมูลหรือตารางค่าที่ระบุ “ตำแหน่งและเวลา” ของวัตถุท้องฟ้า (เช่น ดาวเทียม, ดาวเคราะห์, ดวงจันทร์ หรือดวงอาทิตย์) ในช่วงเวลาที่กำหนดอย่างเฉพาะเจาะจง)
Gimbal ให้ความแม่นยำระดับมิลลิเรเดียน ขณะที่ FSM รับช่วงต่อในระดับไมโคร–นาโนเรเดียน
เชิงระบบ:
Coarse pointing = หาทิศ
Fine pointing = รักษาลิงก์
5. MEMS-based Optomechanical
1. กลไกการทำงาน: จากมอเตอร์ขนาดใหญ่สู่กระจกจิ๋ว
ในระบบเลเซอร์แบบดั้งเดิม การส่ายไปมาของลำแสง (Beam Steering) ต้องใช้มอเตอร์ไฟฟ้าแบบ Gimbal ซึ่งมีขนาดใหญ่และหนัก แต่ MEMS (Micro-Electro-Mechanical Systems) เปลี่ยนวิธีคิดนี้
- Micro-mirrors: กระจกขนาดไมโครที่วางอยู่บนตัวขับเคลื่อน (Actuators) แบบไฟฟ้าสถิต (Electrostatic) หรือ Piezoelectric
- Beam Steering: แทนที่จะหมุนอุปกรณ์ทั้งตัว เราใช้การเอียงกระจกจิ๋วเพียงไม่กี่องศาเพื่อเบี่ยงเบนทิศทางเลเซอร์ ซึ่งทำได้เร็วในระดับ Milliseconds
- PAT (Pointing, Acquisition, and Tracking): MEMS จะช่วยในขั้นตอนการ “เกาะติด” สัญญาณ (Tracking) ได้ดีมาก เพราะมีความถี่ในการตอบสนองสูง (High Bandwidth) ทำให้สามารถชดเชยการสั่นสะเทือนของตัวดาวเทียม (Satellite Jitter) ได้แบบ Real-time
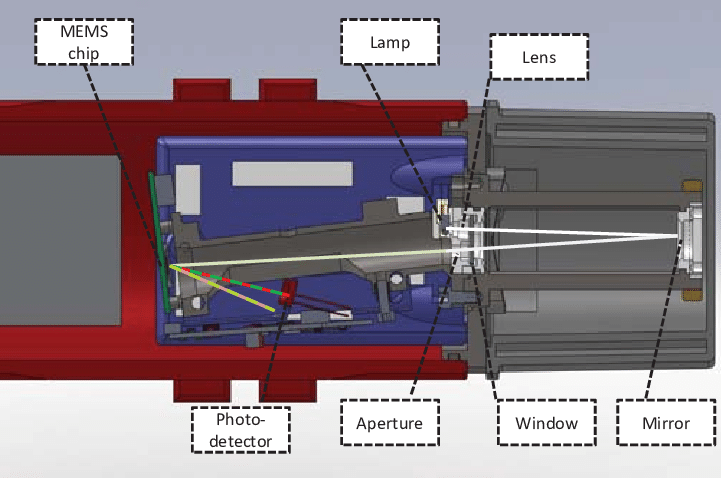
ภาพที่ 2 แสดงโครงสร้างของ MEMs ระบบก๊าซ (ภาพจาก ResearchGate)
2. การวิเคราะห์ข้อดี
- การเพิ่ม Payload: สำหรับดาวเทียมขนาดเล็ก (CubeSats) น้ำหนักทุกกรัมมีค่าใช้จ่ายมหาศาล การเปลี่ยนจาก Gimbal หนัก 2-3 กิโลกรัม มาเป็นชิป MEMS หนักไม่กี่กรัม ช่วยให้ติดตั้งเซนเซอร์หรือกล้องสำรวจทรัพยากรเพิ่มได้
- SWaP-C Optimization: นี่คือแนวคิดหลักในอุตสาหกรรมอวกาศยุคใหม่ คือการลด Size (ขนาด), Weight (น้ำหนัก), Power (พลังงาน) และ Cost (ราคา) ซึ่ง MEMS ตอบโจทย์ครบทุกข้อ
- ความยืดหยุ่นในการเชื่อมต่อ: เนื่องจากกระจกขยับได้เร็วมาก ทำให้ดาวเทียม 1 ดวง สามารถสลับการยิงเลเซอร์ไปยังดาวเทียมดวงอื่นใน Constellation เดียวกันได้หลายดวงในเวลาสั้นๆ
3. ข้อจำกัดและความท้าทายทางวิศวกรรม
แม้จะล้ำสมัย แต่ก็ยังมีโจทย์ที่ต้องแก้ไขคือ
- Limited Field of Regard (FOR): กระจก MEMS มักจะเอียงได้เพียง ±5∘ ถึง ±10∘ เท่านั้น ในขณะที่การเชื่อมต่อระหว่างดาวเทียมอาจต้องการมุมที่กว้างกว่า วิธีแก้คือการใช้ MEMS ร่วมกับเลนส์ขยายมุม (Wide-angle optics)
- Space Environment: รังสีในอวกาศ (Radiation) และอุณหภูมิที่แกว่งอย่างรุนแรงอาจทำให้วัสดุใน MEMS เกิดการล้า (Fatigue) หรือสารเคลือบกระจกเสื่อมสภาพ
- Power Handling: เลเซอร์ที่ใช้ส่งข้อมูลระยะไกลมีพลังงานสูง หากกระจก MEMS ดูดซับความร้อนมากเกินไปอาจเกิดการบิดเบี้ยว (Thermal Deformation)
4. ปัจจัยหรือเหตุการณ์ที่มีผลกระทบอย่างลึกซึ้งในเชิงยุทธศาสตร์: “The Internet of Space”
ในอดีต การเชื่อมต่อเลเซอร์ทำได้แค่ Point-to-Point (จุดต่อจุด) เหมือนสายโทรศัพท์บ้าน แต่ MEMS กำลังจะทำให้มันเป็นเหมือนWi-Fi ในอวกาศ
- Mesh Networking: ดาวเทียมแต่ละดวงกลายเป็น Router ที่ส่งต่อข้อมูลได้รอบทิศทาง
- Resilience: หากดาวเทียมดวงหนึ่งเสีย ระบบ MEMS จะช่วยให้ดาวเทียมดวงที่อยู่รอบข้างปรับมุมหาจุดเชื่อมต่อใหม่ได้ทันที (Self-healing network)
- Mass Production: MEMS ผลิตด้วยกระบวนการเดียวกับชิปคอมพิวเตอร์ (Semiconductor fabrication) ทำให้สามารถผลิตออกมาได้คราวละมากๆ ในราคาถูก รองรับโครงการดาวเทียมหลายหมื่นดวงในอนาคต
ตารางสรุปเปรียบเทียบ
| คุณสมบัติ | ระบบ Gimbal ดั้งเดิม | ระบบ MEMS |
| น้ำหนัก | สูง (กิโลกรัม) | ต่ำมาก (กรัม) |
| ความเร็วในการปรับมุม | ช้า (Mechanical Limit) | เร็วมาก (Micro-second range) |
| การใช้พลังงาน | วัตต์ (Watts) | มิลลิวัตต์ (Milliwatts) |
| ความทนทาน | มีชิ้นส่วนสึกหรอตามกลไก | ไม่มีชิ้นส่วนเสียดสี แต่แพ้แรงสั่นสะท้อนบางช่วงความถี่ |
6. Optomechanical–Control Integration
“หัวใจ” ที่ทำให้ระบบ Optomechanical ทำงานได้จริงในสภาวะสุดขั้วของอวกาศ เพราะต่อให้กระจก MEMS จะดีแค่ไหน แต่ถ้า “ระบบสมองกล” ที่ควบคุมมันไม่แม่นยำพอ ลำแสงเลเซอร์ที่มีความเข้มสูงแต่หน้าตัดแคบมาก (Narrow Beam) ก็จะหลุดจากเป้าหมายทันที
ผมขอขยายความรายละเอียดของ Optomechanical–Control Integration ออกเป็น 4 ส่วนสำคัญ ดังนี้:
1. วงจรการควบคุมแบบปิด (Closed-Loop Control Architecture)
ในระบบสื่อสารเลเซอร์ เรามักใช้ระบบที่เรียกว่า PAT (Pointing, Acquisition, and Tracking) ซึ่งต้องทำงานประสานกันเป็น Loop ดังนี้:
- Sensor Input: มักใช้ Quadrant Photodiode (QPD) หรือ Focal Plane Array (FPA) เพื่อตรวจจับตำแหน่งของลำแสงที่รับเข้ามาว่า “ตกกระทบตรงจุดศูนย์กลางหรือไม่”
- Processing (Algorithm): ตัวประมวลผล (FPGA หรือ MCU) จะคำนวณค่าความผิดพลาด (Error Signal) ระหว่างตำแหน่งปัจจุบันกับตำแหน่งเป้าหมาย
- Actuation: ส่งคำสั่งไปยัง MEMS Actuator เพื่อปรับมุมกระจกชดเชยค่าความผิดพลาดนั้น
2. ปัจจัยสำคัญในการออกแบบ (Design Criteria)
การจะทำให้ Loop ที่กล่าวมาแล้วมีความเสถียร ต้องจัดการกับ 3 ตัวแปรที่จะกล่าวถึง ต่อไปนี้ดังนี้:
- Sensor Latency (ความหน่วงของเซนเซอร์)
- ในอวกาศ ดาวเทียมเคลื่อนที่ด้วยความเร็วสูงมาก (หลายกิโลเมตรต่อวินาที) หากเซนเซอร์อ่านค่าช้าเพียงไม่กี่มิลลิวินาที ตำแหน่งเป้าหมายจะเคลื่อนไปไกลแล้ว
- รายละเอียด: ต้องใช้เซนเซอร์ที่มี High Frame Rate และการประมวลผลบน Hardware (เช่น FPGA) เพื่อลด Time Lag ให้เหลือน้อยที่สุด
- Actuator Bandwidth (การตอบสนองของตัวขับเคลื่อน)
- MEMS มีข้อดีคือ Bandwidth สูง (ตอบสนองได้เร็วในระดับ kHz) ทำให้สามารถชดเชยการสั่นสะเทือนความถี่สูงจากตัวดาวเทียม (Reaction Wheels หรือ Thermal Expansion) ได้ดี
- รายละเอียด: หาก Bandwidth ของ Actuator ต่ำกว่าความถี่ของการสั่นสะเทือน ระบบจะไม่สามารถรักษาสมดุลของลำแสงได้
- Control Loop Stability (ความเสถียรของระบบ)
- ต้องใช้อัลกอริทึมอย่าง PID Control หรือ Model Predictive Control (MPC) เพื่อทำนายล่วงหน้า
- รายละเอียด: หากตั้งค่า Gain สูงเกินไปเพื่อความเร็ว ระบบจะเกิด Oscillation (ส่ายไปมาไม่หยุด) แต่ถ้าต่ำเกินไปจะเกิด Drift (ตามเป้าหมายไม่ทัน)
3. ความท้าทาย: เมื่อลิงก์ขาดช่วง (Link Interruption)
ทำไมการเสียสมดุลเพียงนิดเดียวถึงเป็นเรื่องใหญ่?
- Beam Divergence: เลเซอร์ในอวกาศมีมุมกระจายตัวต่ำมาก (Micro-radians) การเบี่ยงเบนเพียง 0.001 องศา อาจหมายถึงการยิงพลาดเป้าหมายที่อยู่ห่างออกไป 1,000 กม. ไปหลายร้อยเมตร
- Re-acquisition Time: หากลิงก์ขาด หรือสัญญาณอ่อนด้อยลง (Fading/Loss) ระบบต้องเริ่มกระบวนการ “ค้นหาเป้าหมายใหม่” (Re-acquisition) ซึ่งกินเวลาและทำให้ข้อมูลสูญหาย การออกแบบ Control Loop ที่ดีจึงต้องมี “Robustness” ต่อสัญญาณรบกวนชั่วคราว
7. นวัตกรรมระดับ Advanced: Feed-forward Control
นอกจากการรอให้เซนเซอร์บอกว่าพลาด (Feedback) ระบบยุคใหม่ยังเพิ่ม Feed-forward Control เข้าไปด้วย:
- ใช้อุปกรณ์อย่าง Inertial Measurement Units (IMU) หรือ Gyroscope เพื่อตรวจจับการเคลื่อนไหวของดาวเทียม “ก่อน” ที่มันจะส่งผลต่อลำแสง
- วิธีนี้ช่วยให้ระบบ “คาดการณ์” และปรับกระจก MEMS รอไว้ก่อนล่วงหน้า ทำให้เลเซอร์นิ่งเหมือนถือกล้องที่มีระบบกันสั่น (Gimbal Stabilizer) ขั้นเทพ
สรุปความสำคัญเชิงเทคนิค
การรวมระบบนี้เปลี่ยนจากแค่ “อุปกรณ์กลศาสตร์” ให้กลายเป็น “ระบบอัจฉริยะ” ที่สามารถ:
- Self-align: จัดวางแนวลำแสงด้วยตัวเองอัตโนมัติ
- Jitter Rejection: กำจัดผลกระทบจากการสั่นสะเทือนของยานอวกาศ
- Autonomous Handover: สลับการเชื่อมต่อจากดาวเทียมดวงหนึ่งไปยังอีกดวงหนึ่งได้อย่างไร้รอยต่อ
Detector Technologies
ในระบบสื่อสารเลเซอร์ (Optical Wireless Communication) ตัว Detector หรือเครื่องตรวจรับสัญญาณเปรียบเสมือน “ดวงตา” ของระบบ โดยในบริบทของ MEMS-based Optomechanics และดาวเทียมขนาดเล็ก เทคโนโลยีตัวรับต้องมีทั้งความไวสูง (Sensitivity) และความเร็ว (Speed) เพื่อรองรับข้อมูลระดับ Gigabits per second
รายละเอียดของเทคโนโลยี Detector หลักๆ มีดังนี้
1. ประเภทของ Photo-detectors ที่ใช้ในระบบเลเซอร์
1.1 PIN Photodiode
เป็นตัวรับพื้นฐานที่สุด โครงสร้างประกอบด้วยสารกึ่งตัวนำชนิด P, I (Intrinsic), และ N
- จุดเด่น: ราคาถูก, ทนทาน, ใช้งานง่าย, และมีความเป็นเชิงเส้น (Linearity) สูง
- ข้อจำกัด: ไม่มีกำลังขยายในตัว (Internal Gain) ทำให้ความไวในการรับสัญญาณต่ำ ไม่เหมาะกับการสื่อสารระยะไกลมากอย่าง inter-satellite link
1.2 Avalanche Photodiode (APD)
เป็นตัวรับที่นิยมมากที่สุดในระบบสื่อสารเลเซอร์ปัจจุบัน
- กลไก: ใช้ปรากฏการณ์ “Impact Ionization” เพื่อสร้างการขยายสัญญาณภายในตัว (Gain) ทำให้สามารถตรวจจับสัญญาณแสงที่อ่อนมากๆ ได้
- การประยุกต์ใช้: เหมาะสำหรับการส่งข้อมูลความเร็วสูงระยะไกล เพราะมี Signal-to-Noise Ratio (SNR) ดีกว่า PIN photodiode มาก
- ข้อควรระวัง: ต้องการแรงดันไฟเลี้ยง (Bias Voltage) สูง และค่อนข้างอ่อนไหวต่ออุณหภูมิ
2. เทคโนโลยีสำหรับการติดตามตำแหน่ง (Tracking & Alignment)
ในการทำงานร่วมกับ MEMS เราไม่ได้ต้องการแค่ “รับข้อมูล” แต่ต้องรู้ด้วยว่า “ลำแสงตกตรงไหน” เพื่อป้อนค่ากลับไปที่ Control Loop
2.1 Quadrant Photodiode (QPD)
คือ Detector ที่ถูกแบ่งพื้นที่รับแสงออกเป็น 4 ส่วน (Quadrants)
- หน้าที่: ใช้คำนวณหา Centroid ของลำแสง หากลำแสงเบี่ยงไปทางซ้าย แรงดันไฟฟ้าจาก Quadrant ฝั่งซ้ายจะสูงกว่าฝั่งขวา
- ความสำคัญ: เป็นเซนเซอร์หลักที่ส่งข้อมูลให้ตัวควบคุม MEMS ปรับมุมกระจกเพื่อดึงลำแสงกลับมาที่จุดศูนย์กลาง (Tracking)
2.2 Focal Plane Array (FPA) หรือ CMOS/InGaAs Sensors
คล้ายกับเซนเซอร์ในกล้องดิจิทัลที่มีพิกเซลจำนวนมาก
- หน้าที่: ใช้ในขั้นตอน Acquisition (การค้นหาเป้าหมายครั้งแรก) เพราะมีมุมมอง (Field of View) ที่กว้างกว่า QPD
- วัสดุ: หากใช้เลเซอร์ย่าน 1550 nm (ย่านมาตรฐานของ Cisco/Viptela และการสื่อสารแสงส่วนใหญ่) จะต้องใช้เซนเซอร์ชนิด InGaAs (Indium Gallium Arsenide) เนื่องจาก Silicon ปกติจะมองไม่เห็นแสงย่านนี้
3. เทคโนโลยีขั้นสูง: Single-Photon Detectors
สำหรับภารกิจอวกาศที่ห่างไกลมากๆ (Deep Space) หรือต้องการความปลอดภัยสูงสุด (Quantum Key Distribution – QKD)
- SNSPD (Superconducting Nanowire Single-Photon Detector): มีประสิทธิภาพสูงสุด สามารถตรวจจับแสงเพียง “หนึ่งโฟตอน” ได้ แต่ต้องการระบบทำความเย็นจัด (Cryogenic cooling)
- SPAD (Single-Photon Avalanche Diode): ทำงานในโหมด “Geiger mode” เพื่อตรวจจับโฟตอนเดี่ยว มีขนาดเล็กและรวมเข้ากับชิป CMOS ได้ง่ายกว่า
4. ความท้าทายในการเลือก Detector สำหรับ MEMS Integration
| ปัจจัย | ผลกระทบต่อระบบ |
| Response Time | ต้องสั้นพอที่จะรองรับความเร็วข้อมูล (เช่น 10 Gbps) และ Control loop ที่รวดเร็ว |
| Quantum Efficiency (QE) | สัดส่วนที่แสงจะเปลี่ยนเป็นไฟฟ้า ยิ่งสูงยิ่งรับสัญญาณที่อ่อนได้ดี |
| Dark Current | กระแสไฟฟ้าที่เกิดขึ้นเองแม้ไม่มีแสง (Noise) ซึ่งในอวกาศที่ร้อนจัดอาจทำให้ Noise สูงขึ้น |
| Active Area Size | พื้นที่รับแสงต้องสมดุลกับความแม่นยำของ MEMS หากพื้นที่เล็กไป ลำแสงอาจหลุดหายได้ง่าย |
สรุปความเกี่ยวพันกับระบบควบคุม
ในการออกแบบ Optomechanical–Control Integration ที่เราคุยกันก่อนหน้า ตัว Detector จะเป็นคนบอกว่า “Error มีค่าเท่าไหร่” (เช่น ลำแสงหลุดจากศูนย์กลางไปกี่ไมโครเมตร) ก่อนที่ Algorithm จะแปลงค่านี้เป็นแรงดันไฟฟ้าส่งไปให้กระจก MEMS ขยับนั่นเอง
Laser Communication Technology
การสื่อสารด้วยเลเซอร์ระหว่างดาวเทียม หรือ Inter-Satellite Links (ISL) คือเทคโนโลยีที่เปลี่ยนอวกาศให้กลายเป็นเครือข่ายใยแก้วนำแสงแบบไร้สาย (Optical Mesh Network) โดยไม่ต้องพึ่งพาสถานีภาคพื้นดินตลอดเวลา
1. ทำไมต้องเป็นเลเซอร์? (Laser vs. RF)
ดาวเทียมดั้งเดิมใช้คลื่นวิทยุ (RF) เช่น Ka-band หรือ Ku-band แต่เลเซอร์ (Optical) มีข้อได้เปรียบมหาศาล:
- Bandwidth สูงกว่า: เลเซอร์มีความถี่สูงกว่าคลื่นวิทยุหลายพันเท่า ทำให้ส่งข้อมูลได้ตั้งแต่ 10 Gbps ไปจนถึง 100+ Gbps ต่อลิงก์
- ความปลอดภัย (Security): ลำแสงเลเซอร์มีความแคบมาก (Narrow Beam) ทำให้ยากต่อการดักฟัง (Eavesdropping) หรือการรบกวนสัญญาณ (Jamming)
- ไม่ต้องการใบอนุญาตคลื่นความถี่: ต่างจากคลื่นวิทยุที่ต้องขอสัมปทานความถี่สากล (ITU) เลเซอร์ยังไม่มีข้อจำกัดทางกฎหมายในการใช้ช่องสัญญาณ
- ขนาดและน้ำหนัก (SWaP): อุปกรณ์รับส่งเลเซอร์มีขนาดเล็กลงเรื่อยๆ โดยเฉพาะเมื่อใช้เทคโนโลยี MEMS เข้ามาช่วยตามที่เราคุยกันก่อนหน้า
2. องค์ประกอบสำคัญของระบบ Satellite Cross-Links

ภาพที่ 3 Satellite Laser Cross Link (ภาพจาก CircleID)
การจะสร้างลิงก์เลเซอร์ที่ระยะห่างหลายพันกิโลเมตรในอวกาศ ต้องประกอบด้วยส่วนสำคัญ 3 ส่วน:
ก. ระบบเทอร์มินัลออปติคอล (Optical Communication Terminal – OCT)
เปรียบเสมือน “โมเด็มอวกาศ” ประกอบด้วย:
- Laser Source: มักใช้เลเซอร์ย่านความยาวคลื่น 1550 nm (C-band) เนื่องจากเป็นมาตรฐานเดียวกับไฟเบอร์ออปติกบนโลก ทำให้ใช้อุปกรณ์ (Amplifiers/Modulators) ร่วมกันได้
- Optical Amplifier (EDFA): เครื่องขยายสัญญาณแสงเพื่อส่งลำแสงออกไปในระยะไกล
ข. ระบบ PAT (Pointing, Acquisition, and Tracking)
นี่คือส่วนที่ยากที่สุด เพราะดาวเทียมทั้งสองดวงเคลื่อนที่ด้วยความเร็วสูง (ประมาณ 27,000 กม./ชม.):
- Pointing: ดาวเทียมต้องรู้พิกัดของเป้าหมายอย่างคร่าวๆ จากข้อมูล GPS/Ephemeris
- Acquisition: เริ่มต้นกวาดลำแสง (Scanning) เพื่อหาตัวรับของอีกฝั่ง
- Tracking: เมื่อเชื่อมต่อติดแล้ว ระบบต้องล็อคลำแสงไว้ให้แม่นยำในระดับ Micro-radians แม้ดาวเทียมจะสั่นสะเทือน (โดยใช้ MEMS หรือ Fast Steering Mirrors)
ค. รูปแบบการผสมสัญญาณ (Modulation)
- On-Off Keying (OOK): แบบพื้นฐานที่สุด (เปิด/ปิด แสง)
- Coherent Detection (QPSK/BPSK): เทคโนโลยีขั้นสูงที่ส่งข้อมูลได้หนาแน่นขึ้นและทนต่อ Noise ได้ดีกว่า เหมาะสำหรับลิงก์ระยะไกลมาก
3. รูปแบบเครือข่าย Cross-Link (Inter-satellite Network)
การเชื่อมต่อไม่ได้มีแค่จุดต่อจุด แต่แบ่งเป็น:
- Intra-orbit Links: เชื่อมต่อดาวเทียมที่อยู่ในวงโคจรเดียวกัน (ระนาบเดียวกัน)
- Inter-orbit Links: เชื่อมต่อดาวเทียมที่อยู่คนละวงโคจร หรือคนละระดับความสูง (เช่น จาก LEO ไปยัง GEO เพื่อส่งข้อมูลกลับโลกแบบ Real-time)
- Satellite-to-Ground (Optical Feeder Links): การยิงเลเซอร์กลับลงมายังสถานีภาคพื้นดิน (ซึ่งมักเจอปัญหาเมฆและสภาพอากาศรบกวน)
4. กรณีใช้งานจริง (Use Cases) ในปัจจุบัน
- Starlink (SpaceX): ปัจจุบันดาวเทียม Starlink รุ่นใหม่มีเลเซอร์ Cross-links เพื่อลดจำนวนสถานีภาคพื้นดิน (Gateway) ทำให้สามารถให้บริการอินเทอร์เน็ตกลางมหาสมุทรหรือขั้วโลกได้โดยข้อมูลวิ่งผ่านดาวเทียมไปจนถึงจุดที่มี Gateway
- SDA (Space Development Agency): ของสหรัฐฯ กำลังสร้าง “Transport Layer” ซึ่งเป็นโครงข่ายดาวเทียมทหารที่ใช้เลเซอร์ในการส่งข้อมูลทางการทหารทั่วโลกอย่างรวดเร็วและปลอดภัย
5. ความท้าทายทางเทคนิคที่กำลังแก้ไข
- Doppler Shift: เนื่องจากดาวเทียมวิ่งเร็วมาก ความถี่ของแสงเลเซอร์จะเกิดการเปลี่ยนไป (Shift) ทำให้ตัวรับต้องมีความสามารถในการจูนความถี่ตาม
- Point-Ahead Angle: เนื่องจากระยะทางไกลและแสงมีความเร็วจำกัด ดาวเทียมต้องยิงเลเซอร์ไปดักหน้าตำแหน่งที่ดาวเทียมเป้าหมาย “กำลังจะไป” (คล้ายกับการยิงปืนดักเป้าบิน)
- Standardization: ปัจจุบันต่างคนต่างทำ (SDA standard vs. Commercial) อนาคตต้องการมาตรฐานกลางเพื่อให้ดาวเทียมต่างค่ายคุยกันได้
สรุป: เทคโนโลยี Laser Cross-link คือ “กระดูกสันหลัง” ของอินเทอร์เน็ตอวกาศยุคใหม่ ซึ่งเมื่อรวมกับ MEMS และ Advanced Detectors จะทำให้ระบบมีประสิทธิภาพสูงสุดและราคาถูกลงเรื่อยๆ